Key words
robotic - TORS - head and neck cancer - costs - clinical studies
1. Introduction
Robot-assisted surgery (RAS) is increasingly applied in head and neck surgery, however, it is still controversially discussed. The advantages of RAS are that it does not only modify our surgical capacities by improving current surgical methods but also provides new options of surgical approaches [63]. In specialized centers, RAS is regularly performed for surgery of benign and malignant diseases of the oropharynx. In particular in Asian countries, robot-assisted interventions of thyroid gland. This is reflected in the sales numbers of robotic systems as well as the number of cases of RAS that increase worldwide. By optimized visualization and accessibility of the surgery site, RAS allows reduction of the tissue trauma. Additionally, improved esthetic outcomes seem to be possible because in some cases conventional surgery with open incision is no longer needed. Despite all this, RAS could not yet prevail in Europe regarding head and neck surgery. The reasons are the complex handling of the robotic systems and the financial efforts with frequently missing reciprocal financing. But in particular, up to now no real advantage of RAS could be confirmed in comparison to conventional surgical procedures such as transoral laser microlaryngoscopy (TLM).
A robot is a programmable multipurpose tool, which is applied for moving material, workpieces, and special devices. The movement is freely programmable and the robot is suitable for most various tasks [2]. Typically, a robot is used to perform repetitive, tiring activities with high precision and reproducibility. In general, a robot is attributed a high degree of autonomous work, which, however, does not apply for devices used in medicine. The limitations in this context are unsolved technical challenges and existing security concerns.
The robotic systems that are applied today, are computer-assisted surgery tools that at best optimize surgical processes and may increase the accuracy of the intervention. The following review article describes most recent developments of RAS and is divided according to the anatomical regions of the head and neck area. In the following, haptic aspects, risks, and financial features of RAS will be discussed and current clinical studies will be presented.
2. Robotic Systems
The majority of robot-assisted surgeries of the head and neck worldwide is currently performed with the DaVinci system of Intuitive Surgical Company (Sunnyvale, USA) ([Fig. 1]). In the 1980ies, this company evolved out of the research institute “SRI International”. It is meanwhile well-known that the development had a military background; by means of the robot, rapid surgical interventions should be performed in battlefields without physical presence of the surgeons. In 2003, the company merged with “Computer Motion” that produced the former ZEUS robotic system which was withdrawn later from the market.
 Fig. 1 Newest versions of the DaVinci system (Intuitive Surgical, USA). a Xi generation with instrument arms that are positioned above the patient. b Prototype of the DaVinci single post system with instruments that can be triangulated.
Fig. 1 Newest versions of the DaVinci system (Intuitive Surgical, USA). a Xi generation with instrument arms that are positioned above the patient. b Prototype of the DaVinci single post system with instruments that can be triangulated.
The current DaVinci system consists of 3 instrument arms that encompass a rigid shank with a flexible end effector. The instruments lose their approval after 15–20 application cycles and are electronically blocked. Imaging is performed via a fourth camera arm that allows 3-dimensional visualization. In contrast to most other systems, the information exchange between the DaVinci robotic system and surgeon occurs only electronically. So the distance between patient and surgeon is variable and in extreme cases it may even amount to several thousand kilometers [111]. The DaVinci robot is mainly applied in gynecology but also in urology, general surgery, and head and neck surgery.
The DaVinci system came on the European market for the first time in 1999. In 2001, it received the FDA approval for abdominal surgery. The research group around Weinstein et al. in Philadelphia, USA, performed early pioneering work regarding the application of the DaVinci system in the head and neck [61] so that in 2009 the device was approved for transoral robot-assisted surgery (TORS) by the Food and Drug Administration (FDA).
The initial DaVinci model was further elaborated in 2006 by 3-dimensional visualization (DaVinci-S) [16]. The 3D visualization led to significant improvement of the surgical outcome and will certainly be the future standard of robot-assisted surgery [184]. While the next Si-generation of the DaVinci system of 2009 was still placed on a vehicle beside the surgery table, the Xi-generation of 2014 has a design locating all instrument arms above the patient ([Fig. 1a]). The new, slightly reduced X-generation obtained the CE approval for the European market in 2017. The X-generation has thinner arms than the Xi-system, but it is fixed on a vehicle such as the Si-system. So the X-system could be sold at a reduced price of about 1 million USD in order to address new target groups. Until now, the DaVinci Single-Port (SP) system did not receive its approval; it is currently tested in the context of clinical studies ([Fig. 1b]).
Beside the DaVinci system, also the FLEX® system (Medrobotics, Raynham, USA) could be established for transoral robot-assisted surgery. The central feature of the FLEX® system is a computer-assisted flexible endoscope, which may adapt to the non-linear anatomy of the pharynx during insertion ([Fig. 2]). So, basically, even patients may be treated where retroflexion of the cervical spine is not possible. After fixing the endoscope, flexible instruments are inserted via additional channels along the endoscope, with which the surgical intervention in the neck area can be performed [158]. The visualization occurs by means of a HD camera at the tip of the endoscope. The approval study was performed in 4 ENT centers in Europe with a total of 80 patients and led to FDA approval in 2016 for the American market [94]. Thus, beside the DaVinci the FLEX® system is another practically suitable system that is available for head and neck surgery.
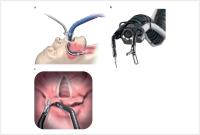 Fig. 2 FLEX® system (Medrobotics, USA). a The flexible design allows adaptation to the human anatomy. b In the tip of the endoscope, camera and light are integrated. The flexible instruments are inserted via separate channels. c The FLEX® system is approved for interventions at the pharynx and larynx.
Fig. 2 FLEX® system (Medrobotics, USA). a The flexible design allows adaptation to the human anatomy. b In the tip of the endoscope, camera and light are integrated. The flexible instruments are inserted via separate channels. c The FLEX® system is approved for interventions at the pharynx and larynx.
3. Oropharynx
The main field of transoral robot-assisted surgery are pathologies of the oropharynx including the tonsils, base of the tongue, and lateral pharyngeal walls ([Fig. 3]). This is in particular due to the good accessibility but also to the relatively high number of patients who suffer from diseases in these regions. Since the DaVinci system was initially approved for interventions in gynecology and urology, Weinstein et al. could document robot-assisted supraglottic laryngectomy in 3 patients for the first time in 2007 [193]. In the same year, a prospective, single-arm phase I study of patients with tonsillar carcinoma was published (T1-2, n=27). The resection margins were sufficient in 25/27 patients, the complications encompassed mucosal bleeding, delirium, unforeseen tracheostomy in the context of OSAS, light trismus, and twang [194]. Some years later, an American multicenter study was published with 192 patients mostly suffering from oropharyngeal cancer [192]. Because of the insufficient visualization, the intervention could not be completed in 15/192 patients (about 7.8%).
 Fig. 3 The main indications for TORS are tumors of the oropharynx (T1-T2) as displayed in this PET-CT.
Fig. 3 The main indications for TORS are tumors of the oropharynx (T1-T2) as displayed in this PET-CT.
Based on those feasibility studies, some centers routinely perform TORS for smaller oropharyngeal carcinomas (T1-T2) [70]. Furthermore, numerous other clinical centers described their experiences with TORS of the oropharynx, including among others German research teams (n=50, n=17) [109]
[113], the French TORS consortium (n=169) [8], a South Korean team (n=27) [103], and a Belgian multicenter trial (n=86) [121]. The overall survival described in those studies is regularly comparable with the one after primary radiochemotherapy [197]. Since those TORS cases are non-randomized case descriptions, however, a significant bias regarding the patient selection must be assumed.
The increasing TORS-specific knowledge led to an inclusion of the parapharyngeal space into the list possible indications of TORS. So O’Malley et al. performed surgery in a case series of 10 patients with benign tumors of the parapharyngeal space with the DaVinci system [129]. Also Ashad et al. were successful in 3 patients with benign or malignant tumors [7]. However, TORS intervention in this area require detailed knowledge of the parapharyngeal anatomy. In particular the courses of the internal carotid artery and the glossopharyngeal nerve are relevant for the transoral approach as they are described in detail by Wang et al. [185]. Furthermore, the incidence of the pathologies in the parapharyngeal space is low and only part of them can actually be treated surgically.
Patients with obstructive sleep apnea syndrome (OSAS) have a particular significance in this context. Since it is a non-malignant disease with high incidence, the question if the financial efforts justify robot-assisted interventions is passionately discussed over and over again. Tonsillectomy and reduction of the base of tongue can certainly be performed adequately without a robotic system. But the advantages of TORS encompass a less important surgical trauma and more rapid postoperative healing. Without any doubt, as described by Vicini et al., uvulopalatopharyngoplasty (UPPP) is a good possibility with correct indication to reduce the complaints of OSAS patients (n=234) [183]. This statement is supported by observations made by Hoff et al. (n=285) [62]. In cases of successful treatment, Friedman et al. could compute an advantage of TORS compared to alternative surgical methods such as radiofrequency ablation or submucous excision of the base of tongue. However, the morbidity with regard to dysphagia and duration of healing in the TORS group was significantly higher (n=27) [49]. Golbin et al. could reveal that the postoperative sleep endoscopy as part of the indication for decision contributes significantly to the surgery success [58]. In their patient cohort (n=104) it also became obvious that TORS interventions are associated with higher costs and longer hospitalization in comparison to conventional surgery without improving the surgical outcome. Finally, different meta-analyses could confirm the treatment success of TORS also for obese OSAS patients [55]
[116]. The question still remains unanswered if TORS is superior to alternative surgery methods, which would justify the high financial efforts.
Remarkably few research teams in the literature deal with robot-assisted resections of tumors of the base of tongue. In 2006, O’Malley et al. were the first to describe this procedure in 3 patients [131]. Another case series of 13 patients was published in 2013 by the Italian group around Mercante et al. [119]. Both studies confirmed a good feasibility with favorable functional outcome.
With increasing experience of the surgeons, meanwhile even robot-assisted interventions in the hypopharynx seem to be well feasible. Already in 2013, Park et al. published a retrospective study on hypopharyngeal cancer where TORS (n=30) was compared to open surgery [140]. Taking into account the selection bias, the TORS group revealed better values of the decannulation rate, swallowing, and hospitalization. The 5-year survival rate was similar in both groups [141]. Smaller case series confirm the feasibility of TORS in the hypopharynx (n=5) and especially in the piriform sinus (n=10) [108]
[187]. The above-mentioned interventions were all performed with the electric resection instruments of the DaVinci system. Exemplarily, Kucur et al. showed in one patient that robot-assisted laser resection is also possible in the hypopharynx [88]. The flexible laser fiber was conducted with the needle holder. Despite those encouraging descriptions, it should be clear that patients for TORS must have an optimal visualization of the hypopharynx and thus they are of course also suitable for transoral laser microsurgery. Another group of pathologies that might represent an extended application of TORS are diverticula of the upper hypopharynx. Patients with a hypopharynx that is difficult to expose might benefit from the use of a flexible robotic system, which was demonstrated in cadaver studies [51].
One important aspect of the selection of therapeutic options are long-term courses of patient groups. Different research teams could confirm favorable survival rates and good functional results for TORS patients [38]
[122]. However, surgical and non-surgical treatment protocols that were compared retrospectively with TORS have not been described in detail. Furthermore, the quality of life of TORS patients was satisfactory in the long-term course while adjuvant radio(chemo)therapy generally reduced the quality of life [45]
[66].
In the past, a small group of TORS surgeons dealt with robot-assisted surgery of free tissue transplants [40]. Mukhija et al. published a first description in 2009; in 2 patients they could insert radial grafts for pharyngeal reconstruction with robotic assistance [125]. Other research teams followed applying radial, femur, or jejunum grafts [18]
[31]
[56]
[142]. In another case series, also radial transplants were used for defect coverage after TORS, which was, however, performed by conventional suture without robotic assistance [13]. One publication of Song et al. must be emphasized here; they describe the robot-assisted suture of vascular anastomosis using special micro-instruments [167].
4. Nasopharynx
The nasopharynx is very suitable for robot-assisted surgery because of its anatomical location. The traditional open surgery is complex and can often only be performed via large accesses such as mandibular splitting associated with high morbidity [188]. On the other hand, the nasopharynx can be accessed with suitable instruments by a transnasal as well as transoral approach through existing openings without the need of further skin incisions. Both accesses are discussed in the following, as single access or in combination. There will be overlappings with approaches to the skull base so that the chapter on “Paranasal sinuses and skull base” is mentioned. In 2008, Ozer et al. were the first to describe complete robot-assisted nasopharyngectomy in a cadaver model [137]. The research group chose the transoral approach with the DaVinci system. Visualization was improved by slight head extension in the Trendelenburg position so that the entire nasopharynx could be visualized and also the internal carotid artery could be exposed on both sides. However, a paramedian splitting of the palate was necessary to perform this intervention.
Another laterally performed splitting of the palate with creation of a pedicled soft tissue transplant was described by Tsang et al. [179]. Further opening of the palate leads to a better view of the surgery site, especially in cases of laterally located pathologies. After surgery, the wound can be sutured completely with robotic assistance. Of course, splitting of the palate is not desirable so that other systems for robot-assisted surgery of the nasopharynx were tested. In 2014, Richmon et al. could first describe transoral nasopharyngectomy with the FLEX® system in a cadaver study [147]. Due to the flexible design of the computer-guided endoscope, splitting of the palate can be avoided due to consistent visualization. The same system revealed advantages in the nasopharynx compared to rigid transnasal endoscopy because 2 instruments can be applied at the same time [159]. The descriptions published by Holsinger et al. are very promising. He had the possibility to test the new DaVinci-Single-Port system for nasopharyngeal surgery [180]. Also in this context, the complete nasopharyngectomy could be performed in a cadaver model under visualization of the internal carotid artery and the trigeminal nerve without palate splitting. If the application of a third instrument arm is beneficial in the practice – as described by the authors – remains to be seen.
The merely transnasal, endoscopic access to the nasopharynx has been described several times as “extended endonasal approach” (EEA) for recurrences of nasopharyngeal carcinomas in the context of salvage surgery [29]. Castelnuovo et al. demonstrated in 36 patients that this intervention can be performed by experienced surgeons also in advanced carcinomas. Because of the limited visualization and accessibility of the anatomical structures, this approach is only feasible in selected patients. The possibility to perform navigated biopsy of the nasopharynx by means of a newly developed continuum robot, was described by Wu et al. in a cadaver model in 2017 [196]. The system consists of 2 concentric rigid tubes that can be controlled independently. This non-linear approach is comparably atraumatic and could thus be applied possibly even under local anesthesia.
In analogy to robot-assisted skull base surgery, transoral approaches in combination with transantral or transcervical approaches have been described for interventions of the nasopharynx [33]
[36]. Both approaches allow a good exposure and manipulation of the entire nasopharynx. However, because of the clearly increased access morbidity and missing drilling instruments for an extended transantral approach, those procedures have been described only in cadaver studies.
Regarding surgery of the nasopharynx, the combined transnasal/transoral approach is most developed. In 2012, Dallan et al. performed complete transoral nasopharyngectomy with the DaVinci system [36]. Palatal splitting could be avoided when the camera arm was inserted transnasally. In this context, posterior septum resection turned out to be helpful in order to visualize the entire surgery site. Also the combination of a transoral robot-assisted approach (TORS) with transnasal endoscopic surgery seems to be appropriate. This surgical procedure uses the advantages of both approaches that may complete each other optimally in the nasopharynx. Sreenath et al. could show in 3 clinical cases that these procedures are generally feasible [168]. The treated patients suffered from retropharyngeal metastasis of a thyroid carcinoma, mucosal melanoma of the nasopharynx, and nasopharyngeal synechia after nasal drug abuse.
The group of Wei et al. in Hong Kong disposes of the largest clinical experience with robot-assisted surgery of the nasopharynx. Already in 2010, one patient with recurrent nasopharyngeal cancer could be successfully operated with the DaVinci system [189]. Despite the use of the instruments with the EndoWrist® design that allow extended rotation in the end region, palatal splitting was necessary for the intervention as described above. Two years later, a patient was treated who also presented cancer recurrence at the roof of the nasopharynx [198]. The intervention was performed similarly to the one of Sreenath et al. with a combined transoral, robot-assisted approach and transnasal endoscopic intervention without robotic assistance so that the tumor could be resected en bloc with sufficient security margins.
A case series of 12 patients with recurrent nasopharyngeal cancer was published by Tsang et al. in 2014 [181]. The tumor stages included T1-T4, and all patients underwent surgery with the DaVinci system via a transoral approach and palatal splitting. In 11/12 patients, sufficient security margins or a close-margin situation could be achieved. The complications that were described encompassed osteonecrosis of the clivus, persisting palatal fistula, and hypoxic brain damage. In the oncological follow-up, 2/12 patients had local recurrences and one patient revealed distal metastases. According to the authors, the survival rate without adjuvant therapy amounted to 83% after 2 years. So TORS represents a therapeutic option with acceptable response rates especially for local recurrences of nasopharyngeal carcinomas. In addition, the research team discusses the significance of surgical therapy of tumor recurrences in the nasopharynx in comparison to alternative treatment options [190]. However, because of the low incidence of nasopharyngeal cancer in Europe, the authors of a meta-analysis gave only reluctant recommendation for robot-assisted interventions in the nasopharynx [120].
5. Larynx
The consequent development and progress of TORS led to robot-assisted inventions in the larynx. Multiple publications describe case series of patients with supraglottic pathologies which can be explained by the good accessibility of the epiglottis. However, this stands in no relation to the low incidence of epiglottic carcinomas. In addition, because of their size or the patient’s age they often cannot be accessed by surgical therapy, which can also be seen in the low number in the published case series. Likewise to transoral laser microsurgery (TLM), the rigid instruments of the DaVinci system require a mostly straight access (“straight line of sight”) and in particular in laryngeal surgery, the size of the device leads to mechanical interferences between the instruments. In order to demonstrate the advantages of TORS compared to TLM, randomized clinical studies are necessary that are currently not yet available.
The most important case series contains first descriptions in animal models apart from 3 clinical cases published by Weinstein et al. in 2007 [191]
[193]. The largest patient cohort was provided by the subgroup analysis of the French TORS consortium (n=84) [145]. However, in this study, high rates of insufficient resection margins (52%) and postoperative bleeding (18%) are surprising since they are not in accordance with other publications. Solares et al. could describe the application of a flexible CO2 laser fiber in the supraglottis [164]. In a non-randomized prospective trial, the Korean group around Kim et al. published significantly better functional results for TORS compared to open partial laryngectomy for supraglottic cancer (n=34), which have to be interpreted with consideration of the selection bias [139]. Further case series were published with similar results [118]
[135].
Beside the DaVinci system, also the Flex® system is used for supraglottic interventions. In the context of the European approval study, a total of 16 patients with supraglottic pathologies of the epiglottis, the false vocal folds, and the arytenoids were treated with flexible TORS [94]. Regardless of the system, no effective advantage of TORS compared to standard TLM could be confirmed for supraglottic laryngeal surgery. Here, further development of robot-assisted surgery with special focus on laryngeal surgery is required.
Because of the minimal skin incision, complete transoral robot-assisted laryngectomy (TORS-LE) might reduce the risk of salivary gland fistula which is an advantage in particular in the context of salvage surgery [54]. Possibly, the recommended additional defect covering by means of pedicled pectoralis flaps is no longer needed in cases of salvage surgery [53]. Neck dissection may be performed either in a second session or can be replaced by clinical follow-up [47]. TORS-LE is performed by preparing from caudal into cranial direction via a small tracheostomy skin incision and then completed transorally by means of the robotic system. As described by Lawson et al., the necessary pharyngeal suture can, be performed transorally [95]. In the following time, American, Australian, and Chinese case series were published with smaller numbers of cases that confirmed the clinical feasibility [31]
[85]
[163]. Apart from the DaVinci system, also other instruments can be applied for TORS-LE. Fernandez et al. demonstrated the application of an ultrasound scalpel for the transoral part of TORS-LE [48]. In a cadaver model, our research team examined the application of the FLEX® system, whereby the transcervical, non-robotic part of the surgery could be significantly extended [160].
Although the DaVinci® system has not been developed for being applied in vocal fold surgery, reports in this area are increasingly published. In 2011, Blanco et al. were the first to publish the resection of a T1 larynx carcinoma with a flexible CO2 fiber [15]. In the following year, Kayhan et al. reported about a case series of 10 patients who underwent robot-assisted chordectomy [74]. Tracheostomy was indicated only in one case and the authors interpreted an advantage of TORS compared to TLM with regard to visualization and accessibility of the surgery site. Similar results were described by Lallemant et al. [93]. Local recurrence was observed in 2/13 patients in the anterior commissure which reveals that this area has to be classified as being critical also with TORS because of the poor exposition. Finally, Wang et al. could describe a case series with glottic laryngeal cancer patients who did not require tracheostomy and who did not develop local recurrences after an average follow-up of 40 months (n=8) [186].
After specific cadaver studies, clinical interventions on the glottic level could also be performed with the FLEX® system in the context of the approval study [50]
[94]. Since the FLEX® system has not been conceived primarily for glottic interventions, the visualization failed in 3 of 5 cases and the intervention had to be converted to conventional TLM. A possible solution of this problem might be new and smaller instruments, especially developed for laryngeal surgery and announced for 2018.
6. Paranasal Sinuses and Skull Base
6. Paranasal Sinuses and Skull Base
The robot-assisted access to the skull base would enormously extend the surgical possibilities of the partly vulnerable anatomical structures of this region. Because of technical limitations, the application of robotic systems in this field is only limited to cadaver models and individual clinical case descriptions [171]
[177]. Due to its size, the DaVinci system seems to have a suboptimal structure for an approach to the skull base [155]. So there are several alternative systems that address the particular requirements of this surgery site.
Burgner et al. have developed a continuum robot that is inserted transnasally without further incisions [22]. Because of its design with 3 concentric metal tubes, any given point in a 3-dimensional space can be selected in a non-linear way ([Fig. 4]). Each metal tube is controlled independently in its extension and rotation via its own monitor. Thus the resection of a pituitary gland tumor seems to be possible in a human skull model. Morimoto et al. suggest a personalized solution where – based on the indication and the according imaging – concentric tubes are produced specifically for each patient [124]. This approach, however, has only been realized for urological patients.
 Fig. 4 The continuum robot of the faculty of continuum robotics of the Leibniz University of Hannover, Germany, consists of concentric tubes that can be moved independently.
Fig. 4 The continuum robot of the faculty of continuum robotics of the Leibniz University of Hannover, Germany, consists of concentric tubes that can be moved independently.
In 2005, the automated surgery of the sphenoid sinus was realized in a cadaver model by the team of Erlangen [20]. For this purpose, a drilling system was mounted to a robot arm with 6 degrees of freedom and coupled to an optic navigation system. The average accuracy of the whole system was 1.5 mm. However, reports on a further development of the systemhave not been published until now.
In the following, 3 support devices for endoscopes will be introduced that permit the application of 2 instruments at the same time. The SOLOASSIST endoscope support (ACTORmed, Regensburg, Germany) has originally been developed for abdominal surgery and is currently adapted in cadaver studies for the requirements of lateral paranasal sinus and skull base surgery ([Fig. 5a]) [86]. The endoscope holder can be controlled directly via a small joystick, which is mounted to the rigid standard instruments. In the published cadaver studies, the most important landmarks at the lateral and frontal skull base could be securely identified.
 Fig. 5 a The newest version of the SOLOASSIST automated endoscope holder for minimally invasive surgery of the paranasal sinuses (AKTORmed, Regensburg, Germany). b The robotic endoscope support of Medineering (Munich, Germany) has been developed for surgery of the paranasal sinuses and is waiting for clinical approval.
Fig. 5 a The newest version of the SOLOASSIST automated endoscope holder for minimally invasive surgery of the paranasal sinuses (AKTORmed, Regensburg, Germany). b The robotic endoscope support of Medineering (Munich, Germany) has been developed for surgery of the paranasal sinuses and is waiting for clinical approval.
A speech control with 23 single commands was integrated in the alternative AESOP endoscope holder (Computer Motion, Goleta, CA) so that also here 2 instruments could be applied at the same time. In addition, anatomical landmarks could be registered and later visualized again by means of a short commando. Nathan et al. demonstrated an approach to the sella turcica in a human cadaver model by means of the AESOP system [126]. Only shortly afterwards, an additional model was developed for the same system allowing the control of the endoscope via movement of the surgeon’s eyes [4]. The AESOP endoscope holder was integrated as independent part of the ZEUS robot that had received the FDA approval in 2001. AESOP and ZEUS systems are no longer manufactured and distributed. The endoscope device of the Medineering Company (Munich, Germany) is comparatively young; it was specially developed for surgery of the paranasal sinuses and the skull base ([Fig. 5b]). The system consists of a multiple-joint holding arm without own motor as well as a smaller robot unit that is fixed at the end of the holding arm. The robot unit is controlled with the foot via a joystick and disposes of 7 degrees of freedom. First cadaver tests of the paranasal sinuses and the skull base have been successfully performed by our own research team; the approval for the European region is expected to be granted in the near future [51].
The FLEX® system described above was mainly developed for the use in the oropharynx. In a human cadaver model, our research group could adapt this system for visualization of the paranasal sinuses, the anterior skull base, and the brainstem [161]. However, the miniaturization of the endoscope for the transnasal approach has not yet sufficiently progressed and the resection of bony structures with the existing instruments remains an unmanageable challenge up to now.
Different approaches have been described for the application of the DaVinci system at the skull base that may have specific advantages depending on the surgery site [144]. The combined transnasal/transoral approach is relatively atraumatic because there is no need to place outward access incision ([Fig. 6a]). In the human cadaver model described by Carrau et al., this approach allowed the access to the infratemporal fossa, the clivus region, and the cranio-cervical transition. Furthermore, the research team could resect malignant tumors from the nasopharynx in 2 clinical cases. Hereby, the cranial part of the tumor was resected by means of traditional rigid instruments via a transnasal approach and the caudal part of the tumor was removed by means of TORS [28]. Also the transoral approach was tested in one clinical case consisting of the successful resection of the dens axis with compression syndrome of the basilar artery [101] ([Fig. 6b]). However, the application seems to be limited because of a smaller availability of bone instruments such as for example a drill bit. The combined transnasal/transoral approach also describes a design where the camera of the DaVinci system is inserted through the nose and for the surgery devices the transoral access is chosen. This approach was first described in a human cadaver model which addressed the posterior cranial fossa [136].
 Fig. 6 Robot-assisted approaches to the skull base encompass a. a Transnasal in combination with transoral or transantral access. b Merely transoral access. c Transnasal access combined with transcervical procedure. d Transoral access combined with suprahyoidal procedure.
Fig. 6 Robot-assisted approaches to the skull base encompass a. a Transnasal in combination with transoral or transantral access. b Merely transoral access. c Transnasal access combined with transcervical procedure. d Transoral access combined with suprahyoidal procedure.
The combined transnasal/transantral approach to the skull base could be demonstrated by Kupferman et al. in a human cadaver model. Also hereby, the visualization of the skull base was achieved by transnasal insertion of the camera of the DaVinci system. The surgery instruments were inserted via the transantral access after midfacial degloving. This approach allowed displaying the medial orbita, the ethmoidal cells, the olfactory fossa, the sphenoid sinus, the pterygopalatine fossa, and the clivus [59]. According to the same research group, the slightly modified transantral/transmaxillary approach is also appropriate for covering skull base defects in the cadaver model [89].
In the context of the transnasal/transcervical approach, the instruments are inserted via a skin incision at the bilateral jaw angle ([Fig. 6c]). The access is extended by blunt preparation and kept open with a trocar during the intervention. The camera system is inserted transnasally [37]. This approach has a higher invasiveness compared to the transoral approach but in patients with unfavorable dental status or maxillary retrognathia it may be beneficial in order to protect the maxilla. In addition, the surgery instruments are positioned in a better angle which facilitates manipulation at the skull base. This transcervical insertion of the instruments could be combined with transoral camera guidance in order to display the sphenoid sinus, the clivus, the sella, and the pituitary gland in a human cadaver model [130].
Finally, the team around McCool et al. could demonstrate an approach to the infratemporal fossa via a combined transoral/supryhyoidal access in a human cadaver model [115]. In this context, an instrument arm was placed in the vallecula via a suprahyoidal auxiliary incision ([Fig. 6d]). The camera system and the second instrument arm were inserted transorally. In this way, the cranial nerves IX-XII, the carotid artery, and the jugular vein could be visualized at their entrance into the skull base and manipulated.
In summary, all systems described above are currently not applicable for surgery of the paranasal sinuses and the skull base [177]. The relevant limitations include the missing drill and suction device as well as the extensive diameter of the instruments (>4 mm). Furthermore, the missing haptic feedback at the skull base is a particular disadvantage because of alternating bone and soft part structures.
7. Thyroid
In thyroid surgery, also the transaxillary endoscopic approach is widespread beside open access incision. It was described in particular in specialized centers with large patient cohorts (n=581) [72]. With introduction of the DaVinci® system, robot-assisted thyroid surgery could be performed via a transaxillary approach in a patient with solitary thyroid tumor for the first time in 2005 [107]. Especially in Southeast Asia, there is a high demand for robot-assisted thyroid surgery because the visible scar in the jugulum is experienced as extremely annoying. Due to this fact, surgeons from this area dispose of good results in cohorts with thousands of patients [9]
[99]. But also non-Asian teams use this approach, however, with clearly lower numbers of cases and mostly non-malignant diseases [1]
[90]
[92].
Several South Korean non-randomized studies compare the advantages and disadvantages of different surgical approaches in thyroid surgery. Lee et al. showed in an oncological multicenter study a significantly shorter duration of surgery for total thyroidectomy than for the endoscopically treated comparison group [100]. The combined transaxillary/transpectoral approach, however, does not promise surgical advantages but only an unfavorable cosmetic outcome [165]. The long-term course of postoperative voice complaints was investigated in a non-randomized study by Song et al. According to the authors, in this patient cohort voice problems eventually associated with thyroid surgery recovered more rapidly after robot-assisted surgery than after open surgery [166]. The patients were follow-up over 2 years by means of a questionnaire.
Complications of the transaxillary approach are well documented and include persisting hypocalcemia (1.1%) and permanent paralysis of the recurrent nerve (0.27%). The robot-assisted complications encompassed skin perforations in the access region (0.1%) and positional problems of the upper extremities (0.13%) (n=3,000) [9]. Especially for transaxillary thyroid surgery, a Japanese group developed wound retractors with integrated camera [68]. This facilitates the creation of a subcutaneous access tunnel before applying the DaVinci system.
In cases of cancer patients who have to undergo thyroidectomy as well as neck dissection, both procedures can be performed via the transaxillary approach. Alternatively, the entire intervention is performed via a bilateral retroauricular access which results in a shorter duration of surgery and quicker recovery of the patients, as reported by Terris et al. (n=15) [174]. The advantages of the retroauricular approach, also in the context of thyroid surgery, could be confirmed by later investigations (n=90) [26]
[44]. Generally, total thyroidectomy and bilateral central neck dissection can be performed via a unilateral retroauricular access incision which is, however, associated with a longer duration of surgery [25].
The transoral approach to the thyroid was developed by American and South Korean groups with the objective to completely avoid visible scars [149]. The endoscopic sublingual thyroidectomy was first described by Benhidjeb in 2009 [11] and adapted in cadaver studies also for robot-assisted surgery [150]. In the context of technical development, the enoral approach was shifted from the sublingual space to the vestibulum and thus the interference of the instrument with the jaw bones could be reduced [150]. However, in the context of this approach, the transient alteration of the mental nerve has to be considered which usually regresses after few weeks [98]
[153].
A passionate discussion arose based on a publication of Lee et al. that assigns a better body awareness to patients after robot-assisted thyroid surgery [102]. On one hand it has to be considered that the study was performed in young, non-randomized Asian patients and the observations cannot be easily transferred to other cultures [105]. On the other hand, it is important in particular for cancer patients to weigh the cosmetic appearance against the oncological safety. In this context, a high-quality and detailed meta-analysis published by Chai et al. could identify no disadvantage for robot-assisted surgery with regard to the oncological safety so that the intervention can be confirmed as being safe at least for experienced surgeons with high case numbers [30].
8. Cervical Soft Parts
In analogy to thyroid surgery, also the development of robot-assisted neck dissection (RAND) is dominated strongly by South Korean research teams. In particular at the Yonsei University of Seoul, RAND interventions are performed by otolaryngologists as well as general surgeons. Also in this context, mainly cosmetic needs are the motor which are not found to this extent in our culture. Currently, 4 different approaches to RAND are described ([Fig. 7]) [200]; (I) transaxillary, (II) retroauricular, (III) combined transaxillary and retroauricular, and (IV) transoral.
 Fig. 7 Robot-assisted neck dissection can be performed via a transoral, a retroauricular, or a transaxillary approach.
Fig. 7 Robot-assisted neck dissection can be performed via a transoral, a retroauricular, or a transaxillary approach.
In 2010, the transaxillary approach was first described by Kang et al. in 33 patients with thyroid carcinoma and cervical metastasis [73]. The unilateral modified radical neck dissection was performed together with bilateral thyroidectomy. The surgical procedure is described in detail in the mentioned publication. The average number of removed lymph nodes amounted to 6.1±4.4 in the medial and 27.7±11.0 in the lateral compartment. The transaxillary approach seems to be suitable for thyroid cancer, but it is not feasible for head and neck cancer because of the long tunnel to the cranial lymph node stations. In 2012, the alternative retroauricular approach via a modified facelift incision could be first described in a cadaver study by Blanco et al. [14]. Afterwards, in the context of a prospective, non-randomized clinical trial in South Korea, 26 patients with oropharyngeal cancer without cervical metastasis underwent either retroauricular RAND or conventional open surgery (NCT01488669, [Table 1]). Interestingly, the complication rates and the number of removed lymph nodes were equal in both groups [97]. Very similar studies that confirmed the results have been published later for patients with head and neck cancer with and without cervical lymph node metastases (cN0/cN+) [78]
[106]
[172]. Not really astonishing was the significantly longer duration of surgery for the RAND group in all studies. However, the duration of surgery in RAND interventions is significantly reduced after respective training. In a publication by Kim et al., 90 head and neck cancer patients underwent RAND performed by only one surgeon [77]. In the group of modified radical neck dissection as well as in the group of supraomohyoidal neck dissection, the duration of surgery could be significantly reduced in the course of the study (298 ->212; 226 ->106 min, respectively).
Table 1 Current clinical studies on robot-assisted surgery of the head and neck (www.clinicaltrials.gov).
|
Trial number
|
Country
|
Period
|
Status
|
Content
|
Number of patients
|
|
Case series
|
|
S1
|
NCT00473564
|
USA
|
2007–2015
|
Completed
|
TORS, case series, DaVinci
|
36
|
|
S2
|
NCT02262247
|
USA
|
2014–2015
|
Completed
|
TORS, FLEX® system
|
80
|
|
S3
|
NCT01095357
|
USA
|
2010–2014
|
Completed
|
TORS, case series, DaVinci
|
60
|
|
S4
|
NCT01819480
|
USA
|
2013–2019
|
Open
|
TORS, case series, DaVinci
|
85
|
|
S5
|
NCT02225496
|
USA
|
2014–2019
|
Open
|
TORS, case series, DaVinci
|
140
|
|
S6
|
NCT01473784
|
USA
|
2007–2020
|
Open
|
TORS, case series, DaVinci
|
360
|
|
S7
|
NCT02159703
|
USA
|
2014–2017
|
Open
|
Radiation after TORS (HPV+)
|
60
|
|
S8
|
NCT02072148
|
USA
|
2014–2019
|
Open
|
Radiation after TORS (HPV+)
|
200
|
|
S9
|
NCT03107182
|
USA
|
2017–2020
|
Open
|
Induction before TORS or RCT
|
56
|
|
S10
|
NCT02760667
|
USA
|
2015–2020
|
Open
|
Induction before TORS or TLM
|
20
|
|
S11
|
NCT01187160
|
USA
|
2009–2014
|
Completed
|
Sleep apnea syndrome
|
75
|
|
S12
|
NCT01107795
|
USA
|
2010–2019
|
Open
|
Sleep apnea syndrome
|
75
|
|
S13
|
NCT02269020
|
France
|
2015–2018
|
Open
|
Neck dissection
|
3
|
|
S14
|
NCT02274493
|
USA
|
2015–2019
|
Open
|
Latissimus dorsi muscle graft
|
15
|
|
S15
|
NCT02743442
|
France
|
2016–2017
|
Open
|
Surgery of the pituitary gland
|
8
|
|
S16
|
NCT02792322
|
USA
|
2016–2018
|
Open
|
TORS in sitting position
|
50
|
|
S17
|
NCT02517125
|
France
|
2015–2025
|
Open
|
DaVinci system (Xi)
|
150
|
|
S18
|
NCT03010813
|
Hong Kong
|
2016–2017
|
Open
|
DaVinci system (SP)
|
60
|
|
S19
|
NCT01488669
|
South Korea
|
2011–2013
|
Completed
|
Neck dissection
|
26
|
|
Randomized studies
|
|
S20
|
NCT01898494
|
USA
|
2013–2023
|
Open
|
TORS and radiation
|
377
|
|
S21
|
NCT02002182
|
USA
|
2013–2019
|
Open
|
Vaccination before TORS
|
30
|
|
S22
|
NCT02292914
|
Brazil
|
2014–2017
|
Open
|
TORS vs. standard surgery
|
1120
|
|
S23
|
NCT02984410
|
Europe
|
2017–2020
|
Open
|
Radiation vs. surgery (with TORS)
|
170
|
|
S24
|
NCT01590355
|
Canada
|
2012–2021
|
Open
|
Radiation vs. TORS
|
68
|
Due to the positive experience of the surgeons with RAND technique, the indication could be extended to non-oncological patients. In a non-randomized prospective trial, Lee et al. described the possibilities of robot-assisted (n=13) and endoscopic submandibulectomy (n=22) [96]. Both procedures were performed with retroauricular access and took about the same time with 63 and 65 min, respectively. None of the interventions had to be changed to open surgery and the cosmetic outcomes were not significantly different.
As described above, the retroauricular approach for neck dissection is superior to the transaxillary approach in the cranial lymph node compartments. If extended neck dissection in the cranial and caudal compartments is planned, the combination of transaxillary and retroauricular access may be reasonable as described by Kim et al. (n=7) [80]. The combined approach is performed in patients with head and neck cancer as well as in cases of thyroid cancer and takes longer than the conventional open access, however, it has favorable cosmetic results (n=22) [79]. The further development reveals that also bilateral thyroidectomy and modified radical neck dissection may be performed by robot assisted surgery via one single ipsilateral retroauricular access (n=4) [25]. Since the duration of surgery was regularly around 5 h, however, the usefulness and the oncological safety of the procedures have to be questioned. In the European countries, the cosmetic result after oncological surgeries is not valued as high as in Asian cultures. Moreover, in our countries the best possible oncological resection safety is preferred to cosmetic considerations. Thus, robot-assisted thyroid surgery and neck dissection are not routinely offered.
Finally, various groups emphasized the significance of the retropharyngeal lymph nodes of patients with head and neck cancer. In 2013, Byeon et al. showed that transoral neck dissection in the retropharyngeal compartment can be performed safely and effectively (n=5) [24]. Lymph node extirpation was performed in the depth of the wound after resection of tonsillar or hypopharyngeal carcinoma. Although only one or 2 lymph nodes could be resected, 4/5 patients had affected lymph nodes. Later, those results were confirmed by an American research team (n=30) [178]. It is further not clear what the optimal interval between resection of the primary tumor and the indicated neck dissection is. In the context of cancer surgeries by means of TORS, neck dissection requires complex changing of the patient’s position and often even another operating room which is not feasible in many cases. Frenkel et al. showed for the New York region that neck dissection was performed in the same session as TORS-based tumor resection in 76% of the cases between 2008 and 2012. In all other patients, neck dissection was either performed before (4%) or in a second session after tumor surgery (20%).
9. Haptics
Unfortunately, the currently available robotic systems only feed back very limited or no haptic information [182]. The missing haptics, however, can be visually compensated, which leads to a low acceptance of the haptic feedback systems [117]. Especially when robotic systems dispose of 3D imaging, the increased physical effort is generally recognized by deformation of the tissue. In the same way, the rigidness is displayed via missing tissue deformity. On the other hand, the missing haptics may for example lead to the situation that sutures are too loose or threads are torn even by experienced surgeons [12]. It is also assumed that the missing haptics in the context of endovascular robotic interventions lead to an increased risk of vascular damage [6]. Evaluating laparoscopic interventions that had been performed by trainee surgeons, it could be revealed that more than half of the damage was caused by excessive physical efforts [173]. Unfortunately, investigations in the discipline of otolaryngology are missing. Nonetheless, those damages might be avoided by according haptic feedback, at least sometimes. Our research group could show in an ex vivo experiment that also with the DaVinci system pressure and torque on the tissue of the surgery site are multiplied in comparison to conventional rigid and also to flexible instruments ([Fig. 8]). The participants of this experiment had to resect parts of a silicone pad with different instruments under continuous force measurement. This increased force application on the tissue may lead to a higher risk of damage with increased morbidity of the patients.
 Fig. 8 In experimental studies, the intraoperative pressure with the robot system is significantly higher than with conventional instruments.
Fig. 8 In experimental studies, the intraoperative pressure with the robot system is significantly higher than with conventional instruments.
First, there is the question how a robotic system may recognize the tissue properties ([Fig. 9]). In the simplest case, this occurs via capacitive pressure sensors to which the electrical capacity changes in cases of pressure and an electrical signal are forwarded. In a similar way, the flection of instruments in case of lateral pressure is measured and forwarded [154]. For the DaVinci system, those reflections could be mostly realized. Kim et al. integrated pressure sensors in the inside of DaVinci forceps that can ex vivo measure the pressure in 4 degrees of freedom [76]. In an in vivo animal model, Wottawa et al. could show that already the information on one-dimensional tissue pressure significantly reduces tissue damages [195]. Modern systems combine several sensors in one instrument such as for example capacitive foils and liquids as well as temperature probes in order to increase the information [138]. Generally, the tissue properties can also be measured via the piezoelectric effect or optoelectronic sensors [69]
[128]. However, those technologies are still under basic development without clinical application.
 Fig. 9 The robotic system has a sensory component retrieving information about the tissue. Via the haptic interface, the system interacts with the surgeon. The visual component compensates deficits of the robotic system. A virtual barrier can be defined by means of CT/MR imaging.
Fig. 9 The robotic system has a sensory component retrieving information about the tissue. Via the haptic interface, the system interacts with the surgeon. The visual component compensates deficits of the robotic system. A virtual barrier can be defined by means of CT/MR imaging.
On the other hand, the measured signals have to be transmitted to the surgeon. Two entities can be differentiated how the human body receives haptic signals. First, proprioceptive signals are perceived, mainly via receptors in the muscles and tendons, that contain information about the position, power, and movement of the body. Second, tactile signals are perceived via skin receptors that process information about pressure, vibration, heat, and pain [132]. In the context of conventional, non-robotic surgery techniques, the surgeons fully exhausts both information sources by intensively palpating the tissue with his fingers. In theory, also the new robotic systems may forward tactile signals to the surgeon. However, complex devices such as electromagnetic needles, temporarily deformable tissue, piezoelectric crystals, pneumatic pumps, or thermal systems are necessary [10].
Different preclinical designs show that the tactile feedback may significantly reduce the applied forces during a procedure. Hereby it is irrelevant if the signals are transmitted via pneumatic balloon interfaces or via vibration motors [104]
[138]. But the realization is complex and the interindividual perception differences are manifold. Additionally, strict hygienic requirements have to be observed in the context of cleaning the instruments also for tactile devices which further complicates their regular application. Hence, current efforts are mainly focused on the proprioceptive information whereby – depending on the level of the signal – the surgeon’s movements with the manipulator are slowed down or limited by means of electric motors [132]. Diaz et al. checked if a haptic signal may be sent to the surgeon via an additional pedal [42]. This method could not prevail until now.
Beside the proprioceptive and tactile signals, robotic systems may transmit information over auditive and visual channels ([Fig. 9]). The research group of Okamura et al. equipped the DaVinci system with an additional sound and image display that shows the applied forces to the surgeon. They could demonstrate that the threads tore more rarely during knotting under visual feedback and the consistency of the forces with the DaVinci system was even better than with the hands [81]
[146]. Similarly, Ly et al. could reveal the advantages of acoustic feedback when it was coupled with sensory forceps [110].
An alternative feedback method are virtual barriers that are determined based on preoperative imaging. The barriers mark important anatomical landmarks such as for example the large blood vessels, and the surgeon may not move the instruments beyond those barriers [19]. Similarly to the haptic feedback mechanisms, the instruments are blocked at the virtual barriers by means of electronic motors of the robotic system.
In summary, the advantage of haptic feedback systems could be confirmed several times up to now. The regular application, however, is complicated because of technical, financial, and hygienic challenges [46].
10. Costs
Because of the additional material efforts, also the financial efforts of robot-assisted surgery are enormous. As the DaVinci system was the only approved system for a long time, detailed cost analyses are only available for this system. According to calculations performed by Dombree et al., the expenses for total laryngectomy in Belgium are about 90% higher (3,581 vs. 6,767 Euro) when robot-assisted surgery is performed [43]. While for robotic surgery the costs of the system itself and the specific instruments are most relevant, those are for conventional interventions the staff-related expenses. According to the authors, a cost equivalence cannot even be achieved when the number of treated patients is maximized and the duration of surgery is minimized. This imbalance of the costs is supported by the fact that the manufacturers of robotic systems always have a monopoly on their surgery instruments which can only be used with the own system [64]. Also in the Japanese health care system, additional expenses for robotic surgery are critically discussed. So a center has to perform at least 300 robot-assisted mediastinoscopies per years in order to achieve the cost equivalence of video-assisted interventions [71]. In Germany, the cost effectiveness could not be confirmed for robot-assisted prostatectomy because of the high material costs [17]. In the USA, the conditions seem to be less significant. According to Byrd et al. the cost effectiveness could be achieved for robot-assisted panendoscopy in cases of CUP (cancer of unknown primary) because a higher probability results to discover the primary tumor [27]. In 206 retrospectively investigated cases, the arising follow-up costs were lower. For patients with obstructive sleep apnea syndrome (n=104) treated by means of TORS, Golbin et al. observed a significant increase of the expenses by an average of 14,708 US$ compared to conventionally treated patients [58].
Another possibility to check the cost effectiveness of robotic systems is the application of Markov models that try to predict the occurrence of certain events by means of stochastic processes. Also in this context, there is no consensus regarding the cost effectiveness of robotic systems. Almeida et al. describe average savings of 1,366 US$ and an increase of the quality-adapted life years (QALY) of 0.25 for oropharyngeal carcinomas compared to primary radiochemotherapy [39]. According to the authors, the difference in favor of TORS can be further improved by minimizing the rate of adjuvant radiation in the TORS group based on suitable patient selection. A similar study performed by Rodin et al. showed a comparable increase of QALY of 0.63 for patients with oropharyngeal carcinomas in Canada [151]. However, primary radiochemotherapy was clearly less expensive with 123,000 US$ than TORS with 178,000 US$, which includes possible adjuvant therapy. Two other publications with similar study design regarding oropharyngeal carcinomas rather see robotic therapy at a disadvantage. Rudmik et al. showed an increase of the expenses of 4,959 US$ in comparison to primary radiochemotherapy without increase of the QALY [152]. Even more convincing was the financial disadvantage of TORS calculated by Sher et al. who found additional charges of 12,100 US$ without changed QALY [162]. All Markov model studies originate from North America so that mainly the same calculation bases were available.
Richmon et al. could calculate an important cost benefit for TORS patients in the context of a retrospective study with 9,601 patients [148]. The advantage resulted not due to the intervention itself but due to the reduced hospitalization and the reduced number of gastric tubes and tracheostomies in the TORS group. Since it was a non-randomized study, healthier patients were more probably assigned to the TORS group, which falsified the results. In a second similar study performed by Chung et al. with 2,067 patients, this problem was taken into consideration when evaluating the data. Nonetheless, the group that was treated with open surgery had longer hospitalization times, higher costs as well as a higher number of gastric tubes and tracheostomies than the TORS group [34]. The TORS group, however, had a higher risk for dysphagia. In addition it should be considered that the expenses of the intervention also depend on the instruments selected by the surgeon. For example flexible laser fibers are particularly cost intensive and cannot be recycled [64]. According to own calculations, an intervention with the DaVinci system causes additional costs of more than 6,000 Euro. In this calculation, acquisition and maintenance are prorated; in Germany those expenses are not reimbursed via a special payment for new examination and treatment methods (neue Untersuchungs- und Behandlungsmethoden, NUB) [113]. The current acquisition costs for the DaVinci system amount to around 2 million US$ (XI model) and about 150,000 US$ for annual service fees. The acquisition of the FLEX system amounts to currently about 800,000 US$. Depending on the number of robot-assisted surgeries per year, the price is reduced per intervention.
11. Number of Cases
In order to better understand the significance of TORS in the whole field of robotic surgery, the consideration of the system distribution and the interdisciplinary number of cases seems to be reasonable. Reliable numbers can be read in the annual reports of Intuitive Surgical Company [67]. Last year, 3,803 DaVinci systems were installed worldwide. Beside 2,501 systems in the USA, those were further 644 systems in Europe and 476 system in Asia. Further 182 systems were found in other continents such as Africa, South America, and Australia ([Fig. 10a]). Also the current sales figures are dominated by the American hospital market. Regularly, more than half of all sold devices are delivered in the USA ([Fig. 10b]). This imbalanced distribution of the systems is also reflected in the number of performed procedures. [Fig. 10c] displays the development of the number of cases as of 2011. For the American market, nearly doubling of robot-assisted interventions can be seen in this period. Interestingly, however, a stable level seems to be achieved for the disciplines of gynecology and urology for several years. Thus, the American growth is mainly based on the continuing increase of the number of cases in general surgery, which meanwhile surpassed urological interventions. Further, the relation of the US American market with regard to the world market is very informative. In other countries, also a continuous growth of the number of cases is observed, but they amount to only one third of the numbers in the USA. Even in the USA, the numbers of cases for head and neck surgery are so low that this discipline is not even mentioned in the annual reports of Intuitive Surgical Company. Considering these numbers it seems to be clear that the further development of the DaVinci robot especially for the head and neck is not in the economic focus of the manufacturer.
 Fig. 10 a Most DaVinci systems are installed in the USA. b The number of annually sold DaVinci systems in the USA is continuously increasing. c Proportionally, particularly in the USA, the number of robot-assisted interventions is increasing as well.
Fig. 10 a Most DaVinci systems are installed in the USA. b The number of annually sold DaVinci systems in the USA is continuously increasing. c Proportionally, particularly in the USA, the number of robot-assisted interventions is increasing as well.
12. Risks
In the literature, every now and again single case reports are published that describe breaking of an instrument arm during robot-assisted intervention [82]. Those publications make clear that the application of robots bears new risks for the patients that have to be discussed during preoperative information. The effective forces of a robotic system are sometimes significant. So the load generated by the endoscope of a DaVinci® system could be measured in vitro with more than 7 kg [52]. However, according to Hockstein et al., fracture of human bones in the head and neck area is not possible with the DaVinci system, as performed deliberately in a cadaver model [61].
Descriptions of complications in the context of robotic surgeries are generated either by investigating own patient cohorts or by systematically studying databases that contain according entries. A comprehensive review article that retrieved information from the American MAUDE (Manufacturer And User Facility Device Experience) database, was recently published by Alemzadeh et al. [3]. The automatic database research could identify a total of 10,624 robot-associated complications in about 1,745,000 robotic interventions in the USA for all disciplines in the period from 2000 to 2013. This corresponds to a complication rate of about 0.6%. The listed complications encompass among others injury of the patients (n=1,391], death (n=144), and system failure (n=8,061). Over the whole period, the absolute number of complications increased continuously proportionally with the increasing number of robotic interventions. However, the complication rate in 2013 surpassed the mark of 1% in 2013. The rate of injuries and deaths was relatively stable since 2007 with an average of 0.083%.
Interestingly, the number of deaths compared to the absolute number of documented complications was highest for head and neck surgery (19.7%) ([Fig. 11]). Beside the anatomical complexity of the neck area, also the deviating documentation behavior of the discipline is responsible and elucidates an important disadvantage of database-related evaluations. Furthermore, the calculation of the rate of robot-assisted interventions with lethal outcome was performed in relation to all robot-assisted surgeries. They were 10 times higher for interventions of the disciplines of cardiothoracic surgery and head and neck surgery than in the disciplines of gynecology, urology, and general surgery (0.052 vs. 0.0057%; p<0.001). Over all disciplines, the reasons for deaths occurred in the postoperative period with 75% (64/86); they included sepsis and bleedings and thus were not directly robot-associated. Only 17% of the deaths occurred intraoperatively (15/86) and were caused by accidental damage of organs (5/86), bleedings, pulmonary embolism, or cardiac arrest. Seven cases could not be assigned to a certain time.
 Fig. 11 Only a small number of all robot-assisted interventions are performed in head and neck surgery and in cardio-thoracic surgery. The relative risk for injury or death in those disciplines, however, is higher.
Fig. 11 Only a small number of all robot-assisted interventions are performed in head and neck surgery and in cardio-thoracic surgery. The relative risk for injury or death in those disciplines, however, is higher.
The majority of all registered complications (88%) is based on failure of the robotic system and could be classified in software and imaging errors (7.4% of all registrations), breaking of device parts into the site (14.7%), sparking (10.5%) as well as unintentional movement of the instruments (10.1%). Summarizing all registrations, the complications led to system reset in 3.1% of the cases to conversion to non-robotic surgery in 7.3%, and to postponing the surgery date in 2.5%.
Injuries and deaths of patients are often caused by a chain of several complications and one single reason cannot be identified. However, according to the MAUDE database, human errors and wrong decisions play a crucial role. The most frequently occurring human errors are listed as follows: insufficient experience in emergency cases, insufficient training with the robotic system, insufficient checkup of the system and the instruments before intervention, insufficient solution of known technical problems, incorrect positioning of the instruments, incorrect configuration of the electro-caustic, incorrect cable connections, wrong coordination of hand and foot movements, incorrect change of the instruments.
In order to avoid the described complications, the following solutions are suggested: (1) simulation environments where the management of complications can be trained satisfactorily under safe conditions; (2) intraoperative real-time feedback to the surgeon via safe surgery pathways and anatomical borders; (3) improved documentation mechanisms that may contribute to the improvement of the system in cases of complications.
Despite all technical risks that are newly appearing with the application of robotic systems, postoperative bleeding remains the most frequent complication of head and neck interventions. In a large patient cohort (n=509), Zenga et al. could document a postoperative bleeding rate of 3% requiring surgical revision [199]. The majority of the patients had the diagnosis of head and neck carcinoma (75%), others had undergone surgery because of non-malignant pathologies of the head and neck. A lower postoperative bleeding rate of 1.7% was observed in a patient cohort that suffered exclusively from obstructive sleep apnea and received resection of the base of tongue (n=243) [183]. Two simultaneously published studies suggest that the ligature of the external carotid artery during TORS interventions cannot reduce the frequency but the intensity of postoperative bleedings [57]
[87]. This statement can be well understood. More astonishing is the high rate of postoperative bleedings with surgical revision which amounted to 5.5% (n=201) and 7.8% (n=265), respectively, without vascular ligature. Pollei et al. compared the postoperative bleeding rates after TORS and TLM interventions in a retrospective, non-randomized trial (n=906) [143]. Hereby, similar postoperative bleeding rates for TORS (5.9%) and TLM (5.6%) were observed. However, more advanced carcinomas with higher T staging had significantly more often TLM than TORS so that in this study a higher risk of bleedings after TORS could be expected for comparable tumor stages. The same result is concluded in a French retrospective study about patients with oropharyngeal cancer (n=154) that could identify a higher age and anticoagulation therapy as significant risk factors for postoperative bleeding beside TORS [91]. In another single-center retrospective review article, Hay et al. found a reduction of TORS-related complications with increasing experience of the surgery team (n=122) [60]. Severe complications such as aspiration and bleedings could be reduced within a period of 5 years from 33% to 10%.
Although hygienic concerns are more and more in the focus regarding the processing of robotic systems, no scientific publications are available on this topic up to now. With regard to the DaVinci system, especially smaller instruments with a diameter of 5 mm are concerned that might still have tissue remaining between the single parts even after cleaning and sterilization. In order to avoid the complicated cleaning procedures, Medrobotics Company has decided to apply single-use instruments for the FLEX® system that are rather expensive.
13. Clinical Trials
The above-mentioned clinical advantages of robot-assisted surgery in the head and neck region can only be confirmed reasonably by clinical trials. [Table 1] summarizes current studies whereby the percentage of prospective randomized trials is remarkably small. The data originate from the publicly accessible NIH database (www.clinicaltrials.gov) and do not claim to be complete.
A retrospective multi-arm trial has already been published comparing TORS with open surgery of T1/T2 malignomas of the oropharynx (S1, NCT00473564, n=36) [41]. Several aspects have been investigated such as the duration of hospitalization as well as the duration of tracheostoma and gastric tube. TORS always showed better results, because of the retrospective study design, however, a bias in favor of TORS regarding the patient selection has to be considered. Another publication deals with the prospective single-arm approval study for the mentioned FLEX® system of Medrobotics Company (S2, NCT02262247, n=80) [94]. In this predominantly non-oncological patient cohort, the safe and effective application of the system in the pharynx and the supraglottis could be confirmed. Two other trials examine the feasibility of TORS interventions in the pharynx and the larynx. Beside the feasibility, also the effectiveness and the quality of life in the long-term course are evaluated. The recruiting phase of the first phase-I trial is already completed, however, the data are not yet published (S3, NCT01059357, n=60). The second phase-I trial is currently open (S4, NCT01819480, n=85). Another American single-center, single-arm study evaluates also swallowing and speaking abilities after TORS beside the oncological outcome of patients with oropharyngeal cancer (S5, NCT02225496, n=140). The most extensive, non-randomized single-arm study on TORS comes from the USA and encompasses patients with malignant and benign pathologies for confirmation of the feasibility of TORS (S6, NCT01473784, n=360).
Currently, 2 single-arm trials from the USA investigate the particular growth behavior of HPV+ tumors. Lin et al. examine for patients treated with TORS if the site of the primary tumor can be spared in the context of adjuvant radiation without risking a reduction of the survival (S7, NCT02159703, n=60). The SIRS study evaluates the possibility to de-escalate adjuvant therapy of HPV+ patients treated with TORS. If the primary tumor could be completely resected and if not more than 2 tumor-infiltrated lymph nodes are found, adjuvant radiation is not performed but regular PET-CT controls (S8, NCT02072148, n=200).
The significance of induction chemotherapy with cisplatin, paclitaxel and nivolumab is investigated by Siewert et al. in the OPTIMA-II trial (S9, NCT0310107182, n=56). In cases of sufficient tumor response, robot-assisted tumor excision is performed after the induction phase. All other patients receive combined radiochemotherapy. A similar concept is provided by the study of Sadeghi et al. where induction chemotherapy with cisplatin and doxetacel is performed (S10, NCT02760667, n=20). The subsequent tumor therapy either consists of TORS or transoral laser microsurgery.
In patients with obstructive sleep apnea syndrome (OSAS), an already published single-arm phase-I trial could show that the combination of robot-assisted reduction of the base of tongue and uvulopalatopharyngoplasty (UPPP) may be clinically beneficial also for pre-treated patients (S11, NCT01187160, n=75) [175]. A similar study on TORS for OSAS patients is currently in the recruiting phase (S12, NCT01107795, n=75).
A series of clinical single-arm studies tries to find new indication fields for TORS. Because of the innovative approaches, the numbers of patients in those pilot studies are very limited. So a very small French study evaluates the transaxillary approach to neck dissection (levels II-IV) which seems to be cosmetically beneficial because of the missing cervical scar (S13, NCT02269020, n=3). The free muscle graft of the latissimus dorsi muscle is often used in reconstructive surgery. The robot-assisted lifting of the muscle transplant is evaluated in a single-center pilot study (S14, NCT02274493, n=15). The access to the pituitary gland via the sella turcica by means of TORS has been published by a French research group in a cadaver study [32]. The subsequent clinical trial that should demonstrate the access to the sella turcica with the manipulator arms of a DaVinci SI®, is in the recruiting phase (S15, NCT02743442, n=8). In the context of a pilot study, Moore et al. evaluated the possibility to perform TORS in sitting position (S16, NCT02792322, n=50). The authors expected an improved visualization of the surgery site and thus shorter durations of the interventions as it had already been performed in 2 patients [123]. The further technical development of the DaVinci® system was evaluated in 2 independent studies. A French research team examined the advantages of the DaVinci® Xi in a single-arm phase-I study for TORS (S17, NCT02517125, n=150). Simon et al. are testing an innovative single-port system for the application for TORS but also for colorectal and urological indications (S18, NCT03010813, n=60). According to reports on the internet bloc www.surgrob.blogspot.com, Intuitive Surgical Company has produced 10 prototypes of the DaVinci SP® (single port) that are currently tested in the clinical use. So the last-mentioned study might possibly deal with one of these prototypes.
The non-randomized study on neck dissection in cases of cN0 from South Korea has already been published. It compares the modified robot-assisted face-lift approach with conventional open access (S19, NCT01488669, n=26). The duration of surgery was about twice as long as in the TORS group (78 vs. 158 min). The average number of the resected lymph nodes, however, was comparable (20 vs. 22) and the cosmetic outcome in the TORS group was better [97].
Without any doubt, those numerous published case series and non-randomized pilot studies are of certain importance for the technical progress and extension of the surgical approaches. But scientifically more important are certainly the following prospective randomized clinical trials. The mostly higher efforts of organization and the clearly complex patient recruiting must not be underestimated. The interventional phase-II study performed by Ferris et al. investigates the de-escalation of adjuvant radiation in HPV+ patients after surgical tumor excision by means of TORS (S20, NCT01898494, n=377). The intensity-modulated radiation therapy (IMRT) is randomized after surgery between the standard dose (60 Gy) and a reduced dose (50 Gy) [65]. The combination of TORS with neo-adjuvant immunotherapy by means of tumor vaccination is evaluated by the research team of Sikora et al. (S21, NCT02002182, n=30). The intravenous active vaccination is performed with genetically modified listeria expressing the HPV-specific oncoprotein E7 [35]. After vaccination, all included patients receive TORS-based tumor extirpation. While the 2 first-mentioned studies randomize adjuvant therapy before or after TORS, the following trials are specially designed to compare the application of TORS with standard therapy.
The extremely extensive randomized phase-III study from Brazil compares robot-assisted surgery with the standard procedure for different tumor entities from all disciplines (S22, NCT02292914, n=1,120). The European approach of the EORTC (European Organisation for Research and Treatment of Cancer) does not differentiate between the various surgical procedures such as TORS or TLM when they are compared in a randomized way with conservative radiation therapy (S23, NCT02984410, n=170). Patients with early oropharyngeal carcinomas are included (T1, T2) who qualify for surgical and conservative therapy procedures. The same approach is pursued by the Canadian ORATOR trial, also for early oropharyngeal carcinomas (S24, NCT01590355, n=68). However, hereby TORS is planned as the only surgical option [127]. In the next years, these studies promise to provide highly interesting results regarding surgical approaches including TORS compared to conservative treatment methods.
Finally, a trial is described that evaluates the quality of life in relation with TORS. Gross et al. compared the activity of patients after TORS or conservative tumor therapy in a non-randomized prospective trial (S25, NCT02663583, n=44). The patients’ activity is measured by means of an electronic bracelet that registers the patients’ movements.
14. New Technologies
It is well known that the potential of robot-assisted surgery is enormous. However, since the high expectations could not yet be fulfilled, the success of robot-assisted surgery depends on continuous development and specialization. In the following paragraphs the technical developments are presented that are not yet implemented in clinical routine but that might influence surgery in the near future.
Beside the approved robotic systems of DaVinci® and FLEX®, numerous other systems exist that are currently in the preclinical testing phase. In the context of an EU-sponsored research project, the MicroRALP system was developed [114]. This partly flexible endoscope is inserted transorally and allows 3D visualization of the vocal folds. Via an interactive screen, the surgeons determines the margins of the resection which is then performed semi-automatically by the integrated laser beam. Further information can be retrieved on the internet site (www.microralp.eu). Up to now, the system could be tested in cadaver experiments and will currently be further developed.
In the past, the team around Olds et al. developed a flexible endoscope that can be controlled via a joystick with only one hand [134]. This Robo-ELF system was specifically developed for laryngeal surgery and allows surgeons to use an additional instrument with the other hand [133]. Robo-ELF was tested in cadaver experiments, currently no information about the further development is available.
A single-port system named “SPORT” of Titan Medical® Company has already been tested successfully for abdominal surgery in animals. According scientific publications, however, are not available. Beside 2 flexible arms, the system disposes of a flexible camera head and reminds so of the newest single-port version of the DaVinci system. After insertion, all 3 arms can be triangulated in order to achieve an efficient working position ([Fig. 12a/b]). It might be possible that this design also has benefits for head and neck surgery if the size of the instruments is adapted.
 Fig. 12 a+b The robotic SPORT system (Titan Medical) is very similar to the DaVinci Single-Port system regarding design and technology. c Continuum robots may allow new fields of indication due to their innovative technology.
Fig. 12 a+b The robotic SPORT system (Titan Medical) is very similar to the DaVinci Single-Port system regarding design and technology. c Continuum robots may allow new fields of indication due to their innovative technology.
Further, the open research platform is interesting that has been designed in the USA. This platform consists of DaVinci components that have served their time and provides unlimited access via a Linux software to the entire software and electronics [75]. Currently at least 11 platforms are installed in different locations.
Continuum robots consist of several concentric tubes that are nested together [21]. Each tube can be moved independently with electric motors whereby a 3-dimensional space is completely covered ([Fig. 12c]). The logistic mental work on how the tubes have to be positioned is performed by a computer. This model is completely different from all other robotic systems and might be interesting especially for surgery of the paranasal sinuses and the skull base due to it non-linear design. Several research groups deal with the development of continuum robots, among them Wu et al. and Burgner-Kahrs et al. who also work on the challenges of otolaryngology [23]
[196].
Also in robot-assisted surgery, the application of lasers for tissue resection is desirable. However, the permanent focus of the laser beam by means of robotic instruments is a problem that has not yet been solved [170]. Furthermore, the expenses for flexible laser fibers must be added that do not incur in cases of classic microscopic laser resection [64]. Typically, CO2 lasers are used for resection in head and neck surgery [112]. Alternative laser sources such as Erbium-YAG laser show qualitatively better cutting properties in experimental approaches and better focusing options [169]. Thus, laser sources are possibly more suitable for the application in robot-assisted surgery.
Another source of information for the surgeon may be endosonography, especially in the context of laser surgery [84]. For this purpose, a special ultrasound head is inserted into the water-filled larynx in order to identify additional anatomical details.
In particular due to electronically transmitted imaging, robot-assisted surgery provides new possibilities for implementing software that may support the surgeon with his work. The advantages of “narrow band imaging” are well known for the early detection of premalignancies or the better differentiation of malignant structures [83]. Furthermore, there are additional technologies such as the high-frequency imaging and optic coherence tomography [176]. In the above-mentioned MicroRALP project, multiple software solutions have been implemented. They allow for example the automatic tracking of mobile tissue structures (soft tissue tracking) [157], methods for surface reconstruction [156], or the automatic instrument recognition by the robotic system [5]. All those methods might open the way to routine application of robot-assisted surgery.
Finally, also geographic distances can be overcome and robot-assisted surgery might be performed over large distances. In an animal model, already a gallbladder could be removed. The surgeon was in New York and the patient was more than 7,000 km away in Strasburg [111].
15. Conclusion
Increasing numbers of cases and the extension of the indications show the high potential of RAS technology in the head and neck. Some patient groups will certainly benefit in the future. Specialized centers already apply robotic systems routinely for interventions in the oropharynx or the thyroid. However, the application of RAS remains merely experimental in the context of the skull base and the paranasal sinuses. Despite all progress, the proof of an advantage of RAS compared to conventional surgery methods such as transoral laser microsurgery could not be provided. In addition, the financial efforts and the complex handling of the robotic systems are the major challenges for a comprehensive implementation of robot-assisted surgery in clinical routine. Further randomized clinical trials will help to further clarify the advantages and disadvantages of this interesting technology.
Special instruments and also alternative RAS systems are desired for the increasing number of possible RAS indications. Even a combination with other technical developments such as for example hyperspectral imaging, visual haptics, or automated resection mechanisms seems to be possible.
In summary, RAS may complete the current conventional surgery methods in the future without replacing them. Technical, scientific, and ethical conflicts will increasingly influence the work of current generations of head and neck surgeons.





